Communication was not established between the RoboPhilo and the computer. Because this milestone had to be met before communication with the Kinect could be worked on, only one of the milestones was achieved. After troubleshooting the robot for several weeks, I exhausted all online resources for making the robot work and found out that in many cases the RoboPhilo never works.
Looking forward, I do not think it would be practical to continue this project using the included ATmega32 microcontroller to communicate with the robot. If the RoboPhilo is used in the future, I would recommend using a different microcontroller. This presents a problem of powering the individual servos so modification to the servos may have to be made depending on the microcontroller choice. The more practical solution would be to research a different robot, if the budget allows. I would also recommend that regardless of this choice, it is ensured that the robot is functional before beginning the project, otherwise the student may spend more time troubleshooting the robot than actually tuning and programming it like I did.
Once the robot is functional, Kinect communication could be established. My plan for this was to have the Kinect read the joint angles of the person in front of the camera and input these values into a motion file for the robot, which would than play back the users motions. During playback, it would also compare the values with a preexisting set of values within a certain tolerance. If the two differed by an amount greater than these tolerances, the robot would perform the preexisting motion. If the two were similar enough, the robot would perform the next exercise downloaded.

Front of Robot
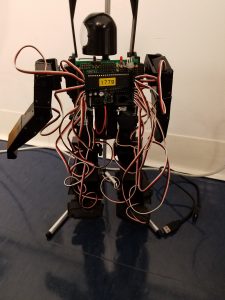
Back of Robot

ATmega32