This is a video on my senior year capstone project. It will help future students decide if they would like to create an electromagnetic cannon tank.
Gantt Chart
StandardThis is my Gantt chart. It will show you my projected plan for the project and how close I am to completion.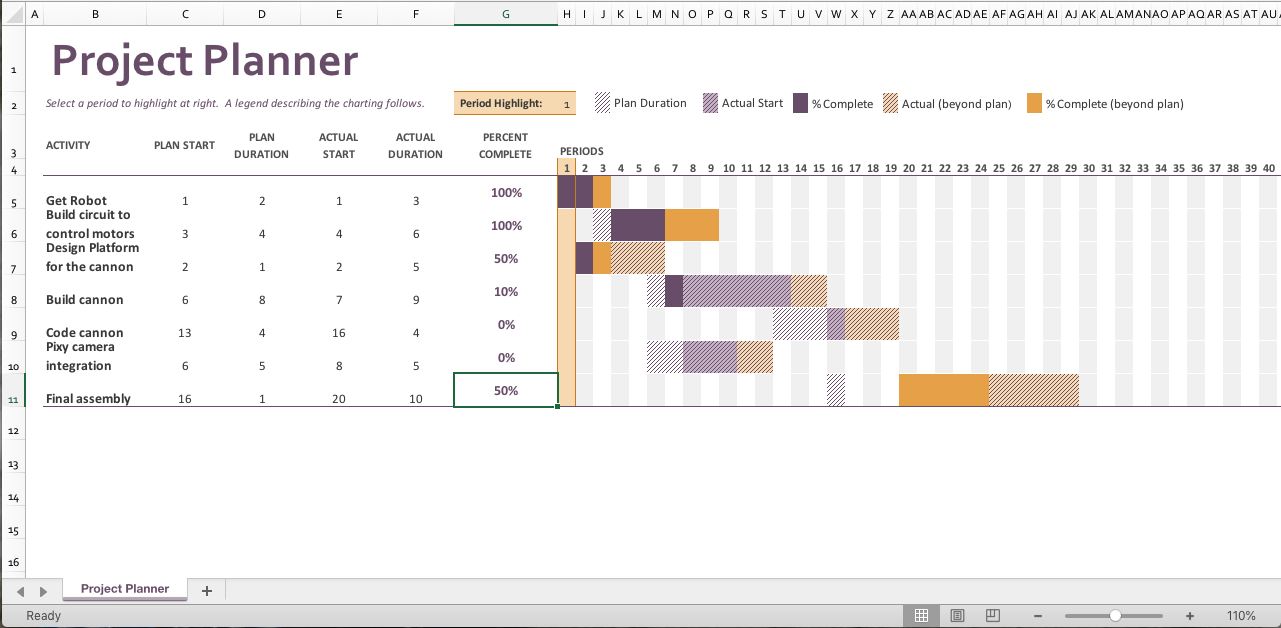
Motor Control
StandardI have written a simple code that controls the motors on my tank using the Arduino mega. The code turns on both motors in a forward direction for two seconds then turns off for a second, then backwards for two seconds then off for a second.
I then got into the left right control of the motors. The simplest way to make it turn left and right is to make one motor turn off and keep the other one on. To turn right you turn off the right motor forcing the robot right, and the opposite to turn left. A more advanced way to turn left and right is to turn the motors in opposite directions. to turn left you keep the right motor going forward and turn the left motor in reverse.
https://photos.google.com/photo/AF1QipPP2TnSyBlG3NAacqhjKMkCtv4y8AatwXZvtjzX
Professional Practice Topic
StandardFor my Professional Practice Investigation project I will be doing topic 3: intellectual property and patent laws.
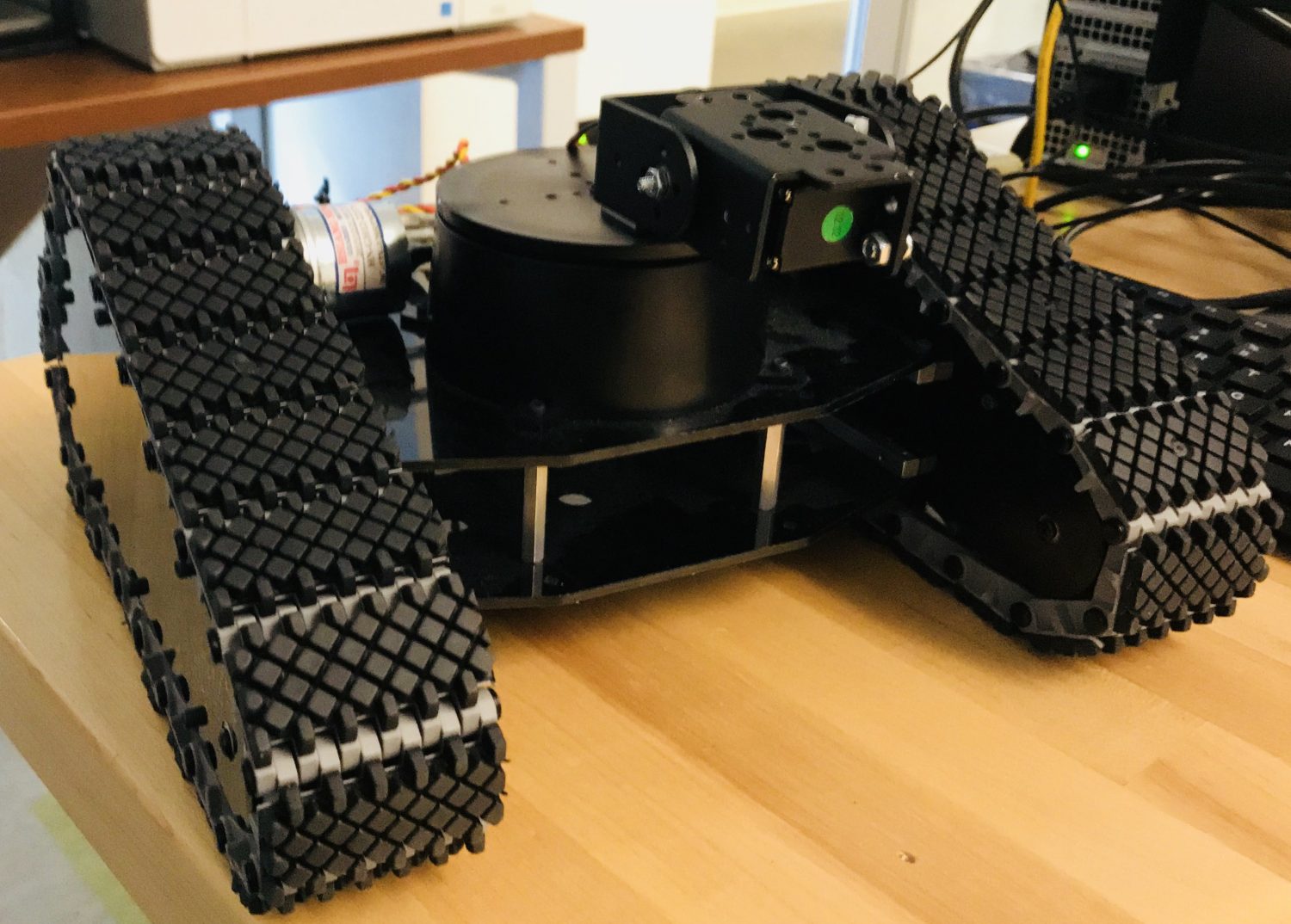
Project Deliverables For Electromagnetic Tank
StandardFor this project the idea is to create a robot that can move and shoot an electromagnetic device autonomously. Project deliverables include robot movement, aiming, controlling the barrel, and creation of an electromagnetic barrel that fires the projectile some distance.
Robot movement will be controlled by a microcontroller that is TBD. Controlling the barrel will use a separate but similar microcontroller preferably two that can easily communicate between each other. For aiming i will be using an infrared sensor flashing at a certain frequency that when the sensor on the robot sees it it will fire. I will do research to determine the most effective design for the barrel. These will include single, multiple, and split coil designs.