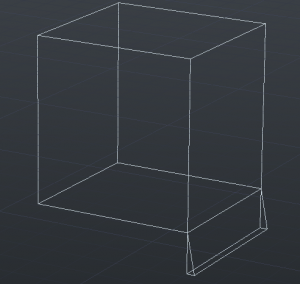
During the sixth week a lot of headway was made. All 6 sensors I am using, long range IR, short range IR, and 4 reflective sensors were operational and data was collected. Movement during this week was also obtained. In order for all the sensors and DC motors to be powered an additional circuit had to be constructed. This circuit offers a 5 V and GND female pin lines to power everything. This circuit is powered by an 8 V battery which is ran through a voltage regulator. Along with the voltage regulator circuit all of the sensors were soldered with wire (Red – Power, Black – GND, Green – Signal). This allows for easy construction when running the power wires to the power circuit and the signal wires to the Arduino. This schematic can be found in the notebook. A 3-D body for the bot was also constructed using AutoCAD. The design can be found below. The last part seen in the scanned notebook is the logic for obtaining the desired movement of the DC motors. The goals for next week is to complete the project closeout.
Scanned Notebook: Week-6
3-D Body: