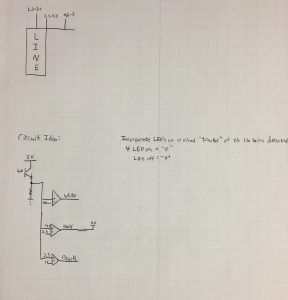
With the use of lines to lead the robots to the package locations, a line follower circuit needed to be designed. The idea was to use phototransistors to sense whether a line was detected or not.
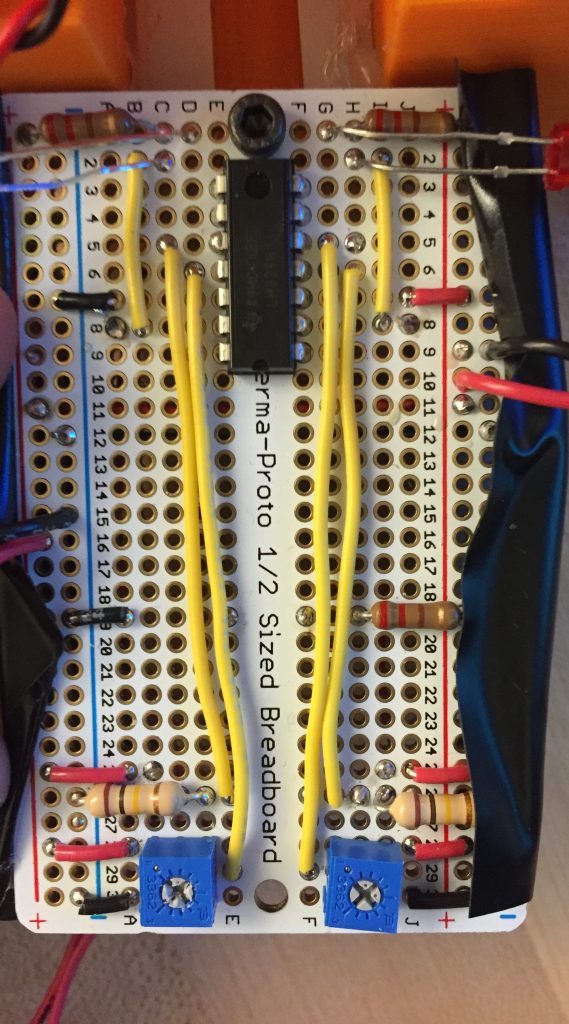
The test done for this was to obtain voltage values for when the phototransistor was completely on the line (black tape), halfway on the line, or completely off the line and a basic circuit (using a comparator chip) built from those values as depicted in the Figure below.