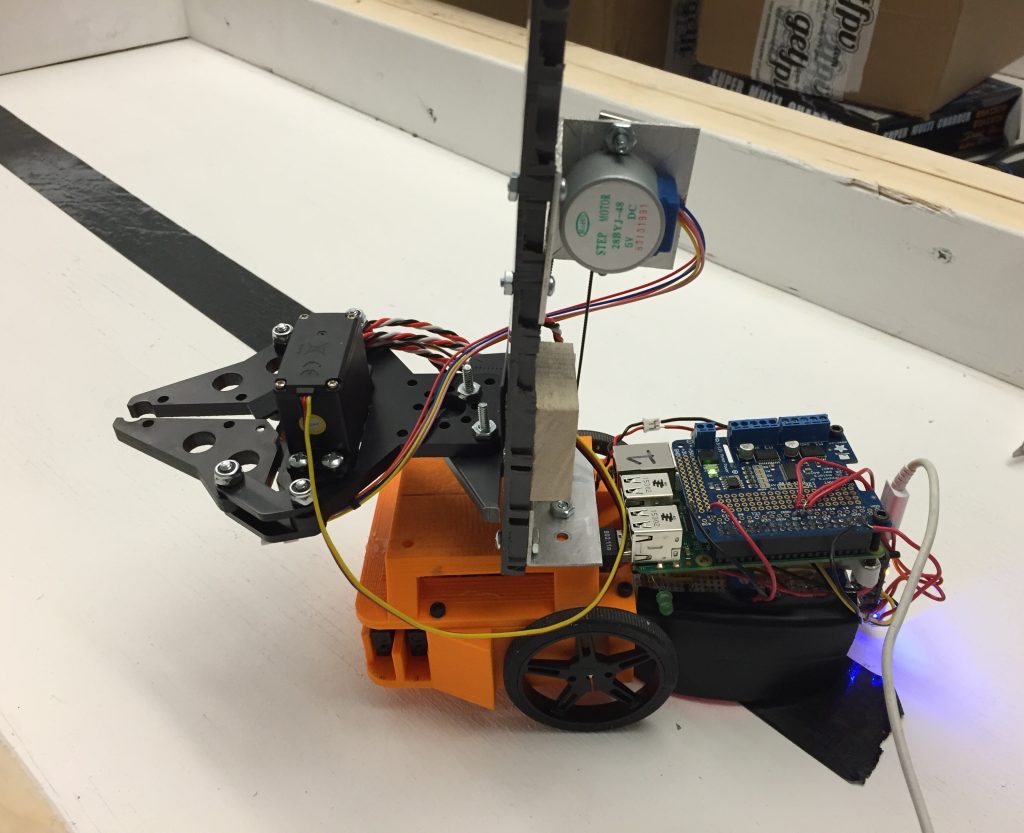
The hardware used for this project is a modified pre-built micromouse robot. The additions made were an elevator mechanism to move the arm up and down and a claw to be able to grab objects. Attached to the back of the robot are the key hardware aspects of the Raspberry Pi microcontroller with a MotorHat and a custom designed line-follower circuit using phototransistors.