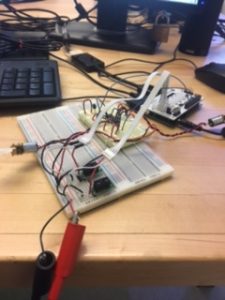
Now that the GPIOs are accessed, it was time to put them to use. I was able to control basic forward and reverse motion with one DC motor using two 5cm digital proximity sensors. This code was taken and slightly modified from examples given by the libraries downloaded. Simply using the Tilt program, i was able to utilize the digital sensors by using the same GPIO’s set in that program. Below is the H-Bridge and connections made between the Dragonboard and sensors.